Synthetic Data Solution
将现实数据扩展为数字孪生, 构建 AI 可学习的模拟环境。
将现实数据扩展为数字孪生, 构建 AI 可学习的模拟环境。
用源于现实的合成数据
训练物理AI。
要让物理AI在真实工业环境中稳定运行,需要对现实世界进行大规模学习。然而真实数据采集缓慢且成本高昂,越是关键的异常情况越难获取。 SKAI Intelligence 将工业现场还原为精密的数字孪生,让 AI 即使在现实环境中也能稳定地学习与运行。
物理AI最难的部分不是模型,
而是数据。

光照变化
工厂的清晨与午后光照不同,各区域之间的不同。 这正是在实验室表现完美的模型 一到现场就失准的首要原因。
材质与表面特性
在金属、塑料、玻璃混杂的现场,各自的反射率与质感千差万别。只学习了其中一部分的模型,一旦遇到其余部分便会崩溃。

边缘案例
缺陷之所以是缺陷,正因为无法预测。 那些在现场难以采集的稀有案例, 往往成为部署后最大的失败根源。
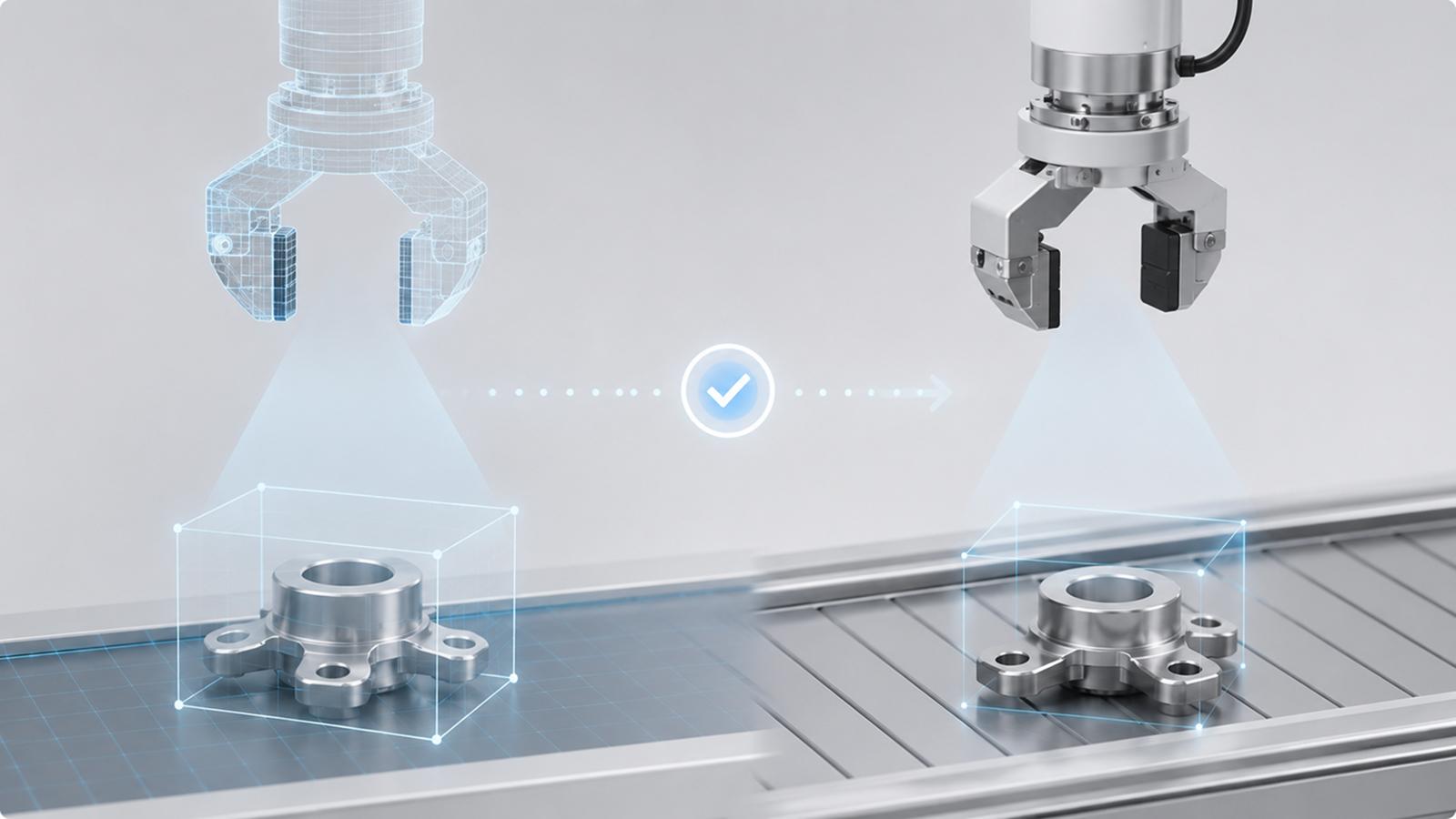
解决方案概览
将现场数据
转化为 AI 可学习的模拟数据
在真实工业环境中,获取足够的数据是最困难的环节。 尤其要同时采集各种异常情况、复合材质以及光照与相机条件, 需要大量时间与成本。
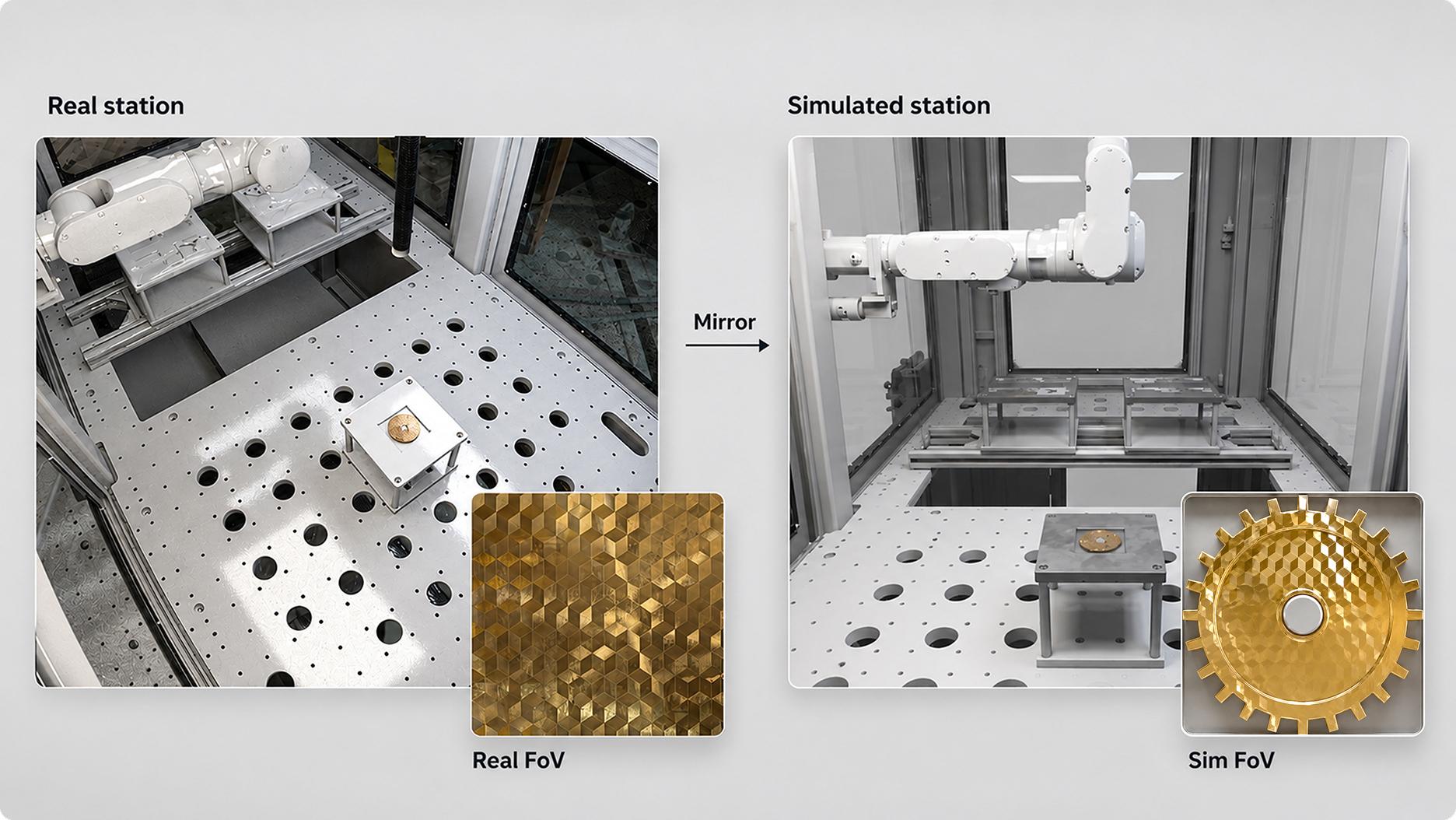
SKAI Intelligence 通过基于 NVIDIA Omniverse 的数字孪生流水线 精密还原真实环境,生成基于模拟的合成数据, 让 AI 能够大规模学习贴近真实环境的数据。

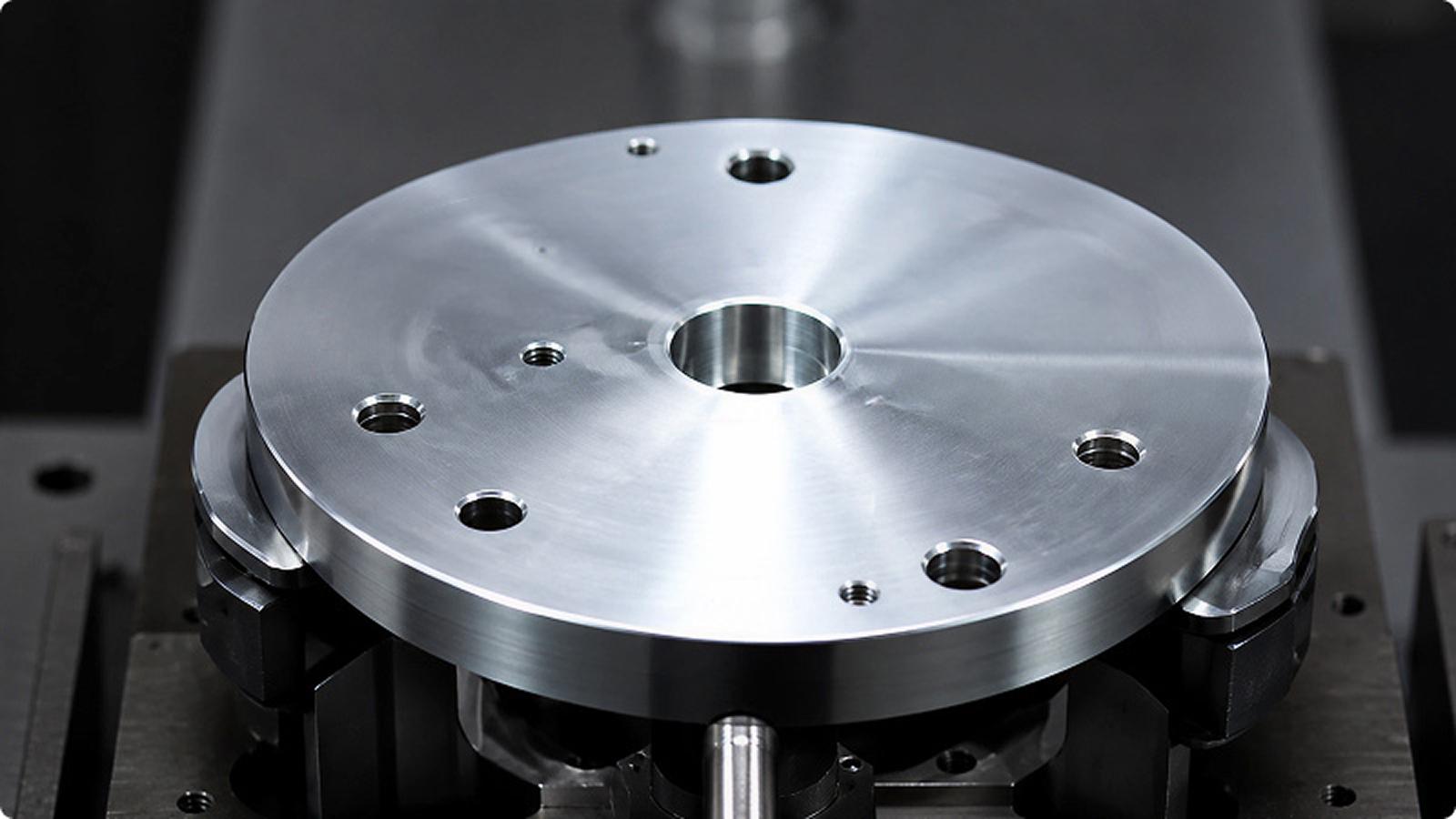
现实数据输入(Real-World Inputs)
将 AI 训练所需的现实数据——产品、零部件、CAD、传感器条件、相机与光照环境等——构建进数字环境,并精确还原多样的材质、表面特性以及工业现场条件。
现实数据输入(Real-World Inputs)
将 AI 训练所需的现实数据——产品、零部件、CAD、传感器条件、相机与光照环境等——构建进数字环境,并精确还原多样的材质、表面特性以及工业现场条件。
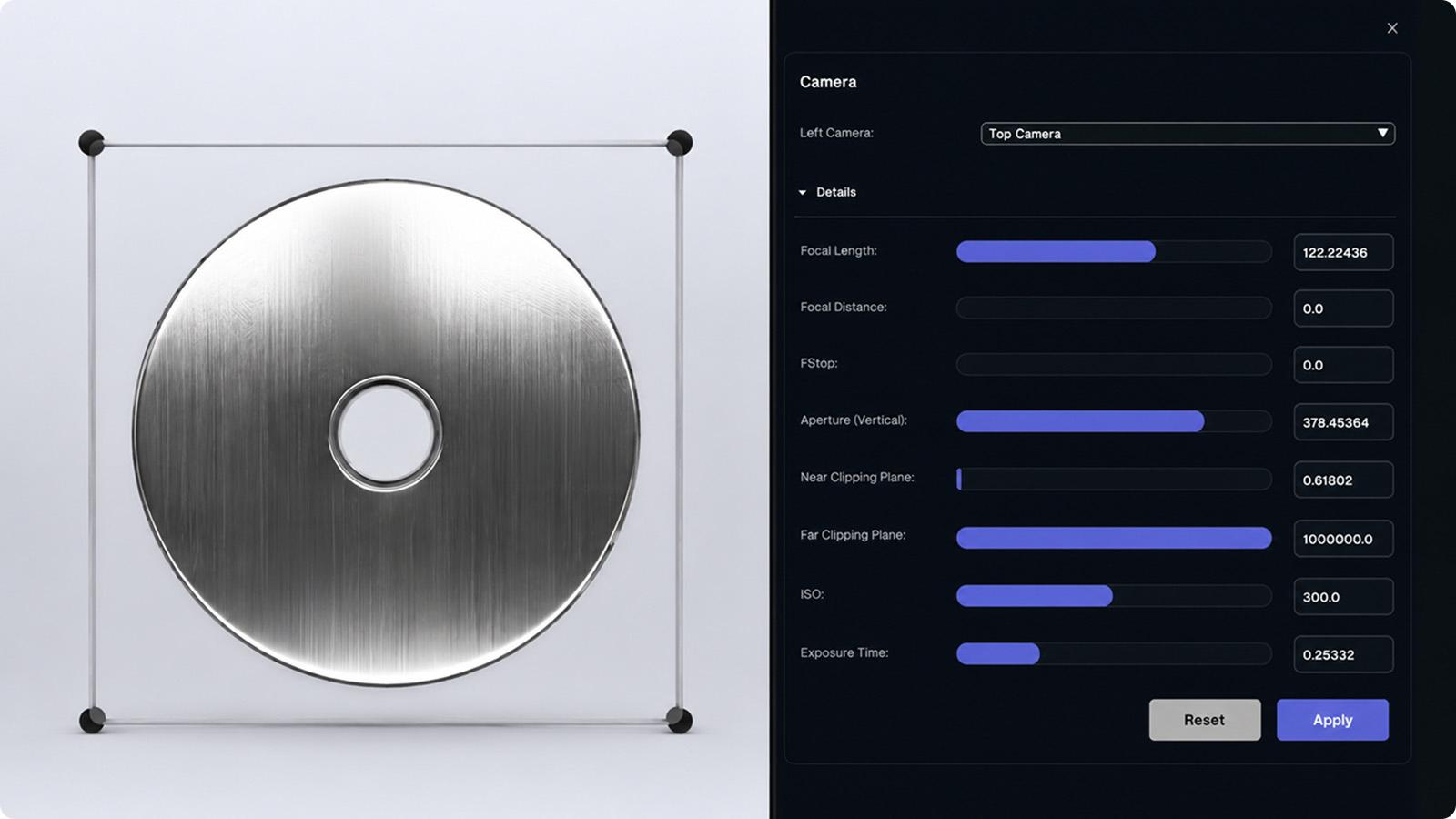
基于 Omniverse 的数字孪生模拟
在基于 NVIDIA Omniverse 的环境中,对光照、相机、背景、视角与环境变量进行基于物理的模拟,可反复生成现实中难以采集的各种情况与边缘案例。
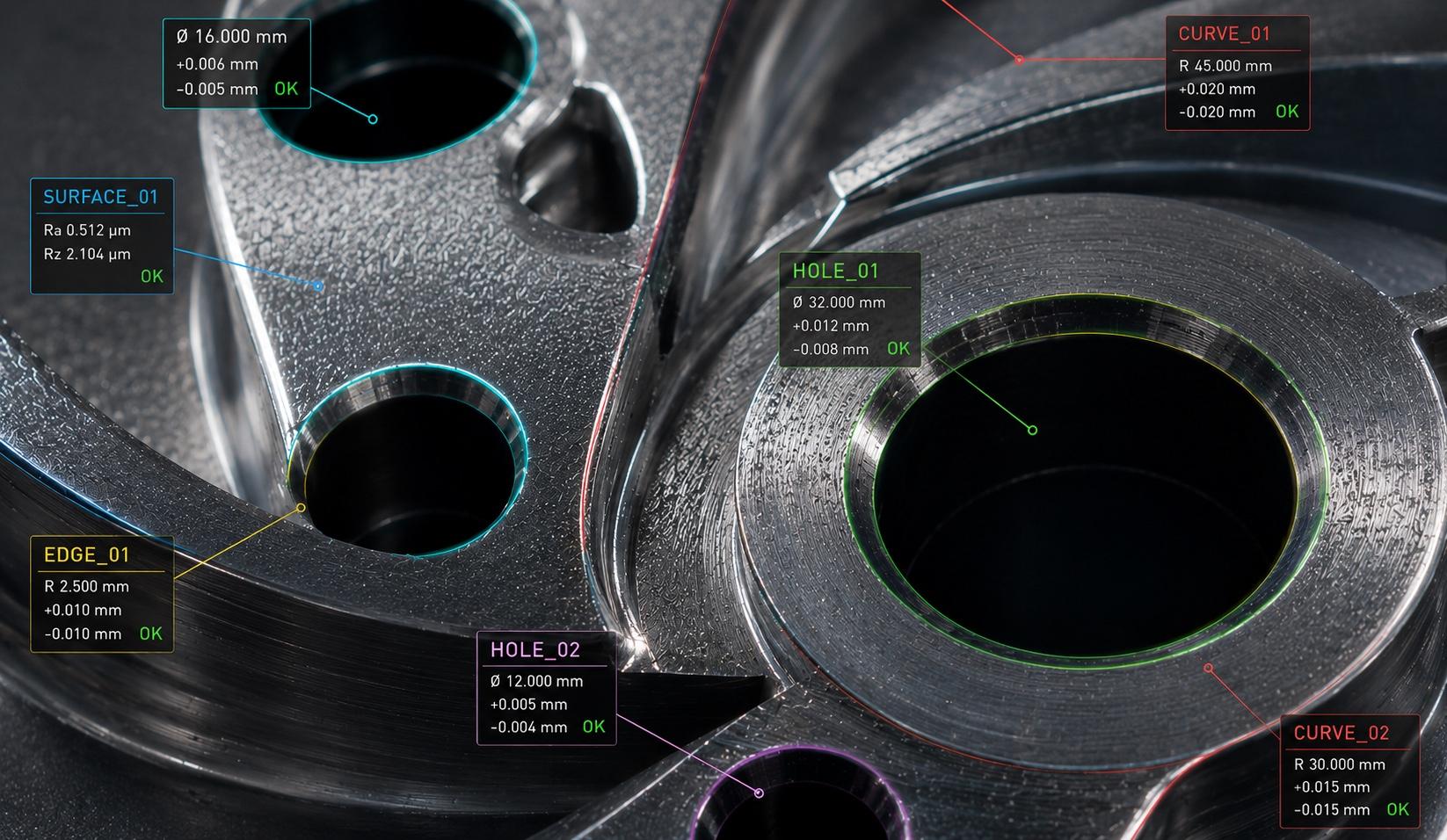
生成用于 AI 训练的合成数据
生成包含自动标注的训练数据,助力机器人、工业AI与机器感知模型即使在真实环境中也能稳定地识别与判断。
99% 视觉任务成功率
这是采用 SKAI Intelligence 合成数据训练的 AI 在真实工厂取得的成果—— 并非受控测试,而是在运行中的生产线上实测的数据。

最高 99%
视觉识别准确率

最高降低 30%
视觉领域差距
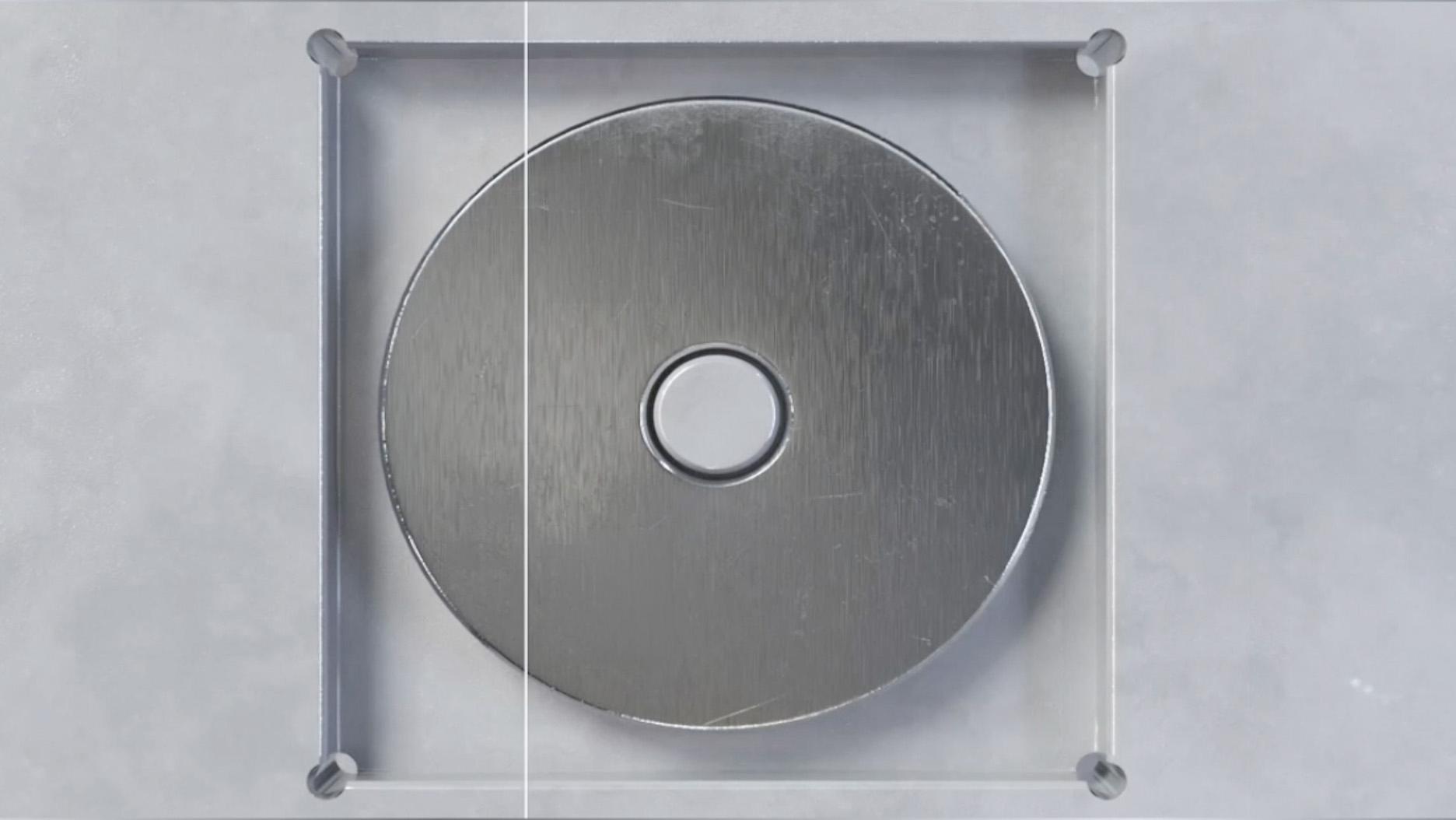
小于 1mm
数字孪生精度
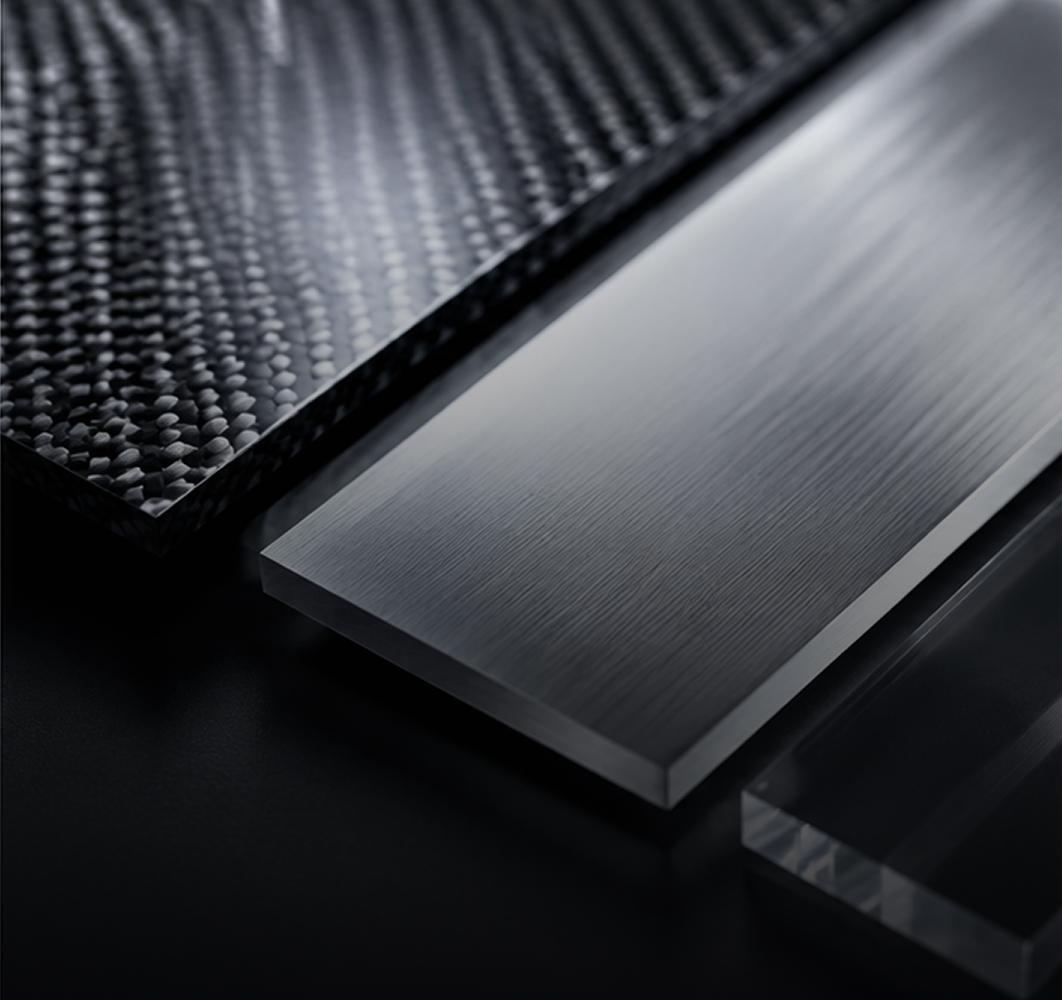
材质与表面建模
依据物理规律还原金属的反射、塑料的透明度与织物的质感—— 不仅是肉眼看起来相似,而是与传感器的感知方式完全一致。
光照与相机模拟
全面模拟工厂中实际出现的光照环境, 包括直射阳光、荧光灯、阴影与反射。
可控随机化
以系统化而非随机的方式组合变量, 有计划地生成现实中可能出现的每一种情况,不遗漏任何一种。

自动标注与结构化
在生成数据的同时自动生成精确标注, 无需人工即可直接用于训练。
最后 1% 所造就的决定性差异
机器人视觉准确率的细微差异,可减少人工干预, 并在真实工业环境中创造巨大的运营效率与经济价值。

99% 的准确率改变了产业的经济性。 仅仅提升 1% 的识别准确率,便可减少异常处理与作业失败,大幅提升运营效率与自动化水平。
缩小并持续保持差距的闭环

现场 → 模拟 → 现场
SKAI 的流水线将工厂现场的真实反馈回流至模拟环节——精炼数字孪生、生成新的边缘案例并重新训练模型。最终成果是一套在贵司产线上、以贵司数据、于贵司环境中持续改进的视觉系统。

01.Real-World Capture
将产品、材质、光照、相机条件等现实数据, 构建为数字环境的基础。

02.Digital Twin Simulation
在基于 NVIDIA Omniverse 的环境中, 模拟贴近真实的工业条件与边缘案例。

03.Synthetic Data Generation
基于自动标注, 大规模生成用于 AI 训练的模拟数据。

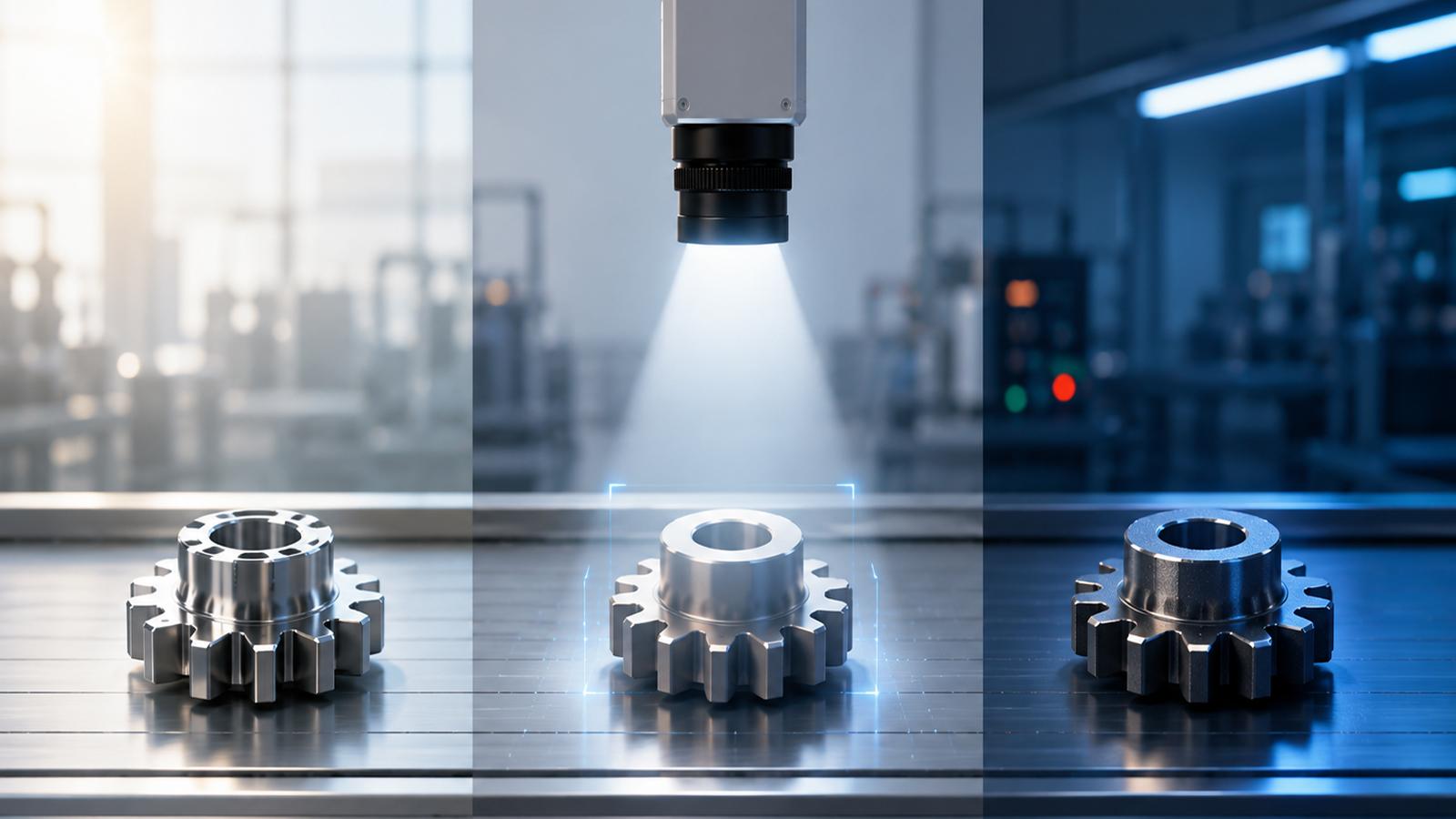
04.Real-World Deployment
助力 AI 即使在真实工业环境中 也能稳定地识别与运行。
专为真实工厂环境而设计
从现场的光照变化、材质反射,到无法预测的变量。 SKAI Intelligence 立足真实工厂环境,构建让 AI 在现实中也能稳定运行的模拟与合成数据流水线。
机器人装配(Robotic Assembly)
在真实生产光照与杂乱环境下 进行姿态估计、零件识别与验证。

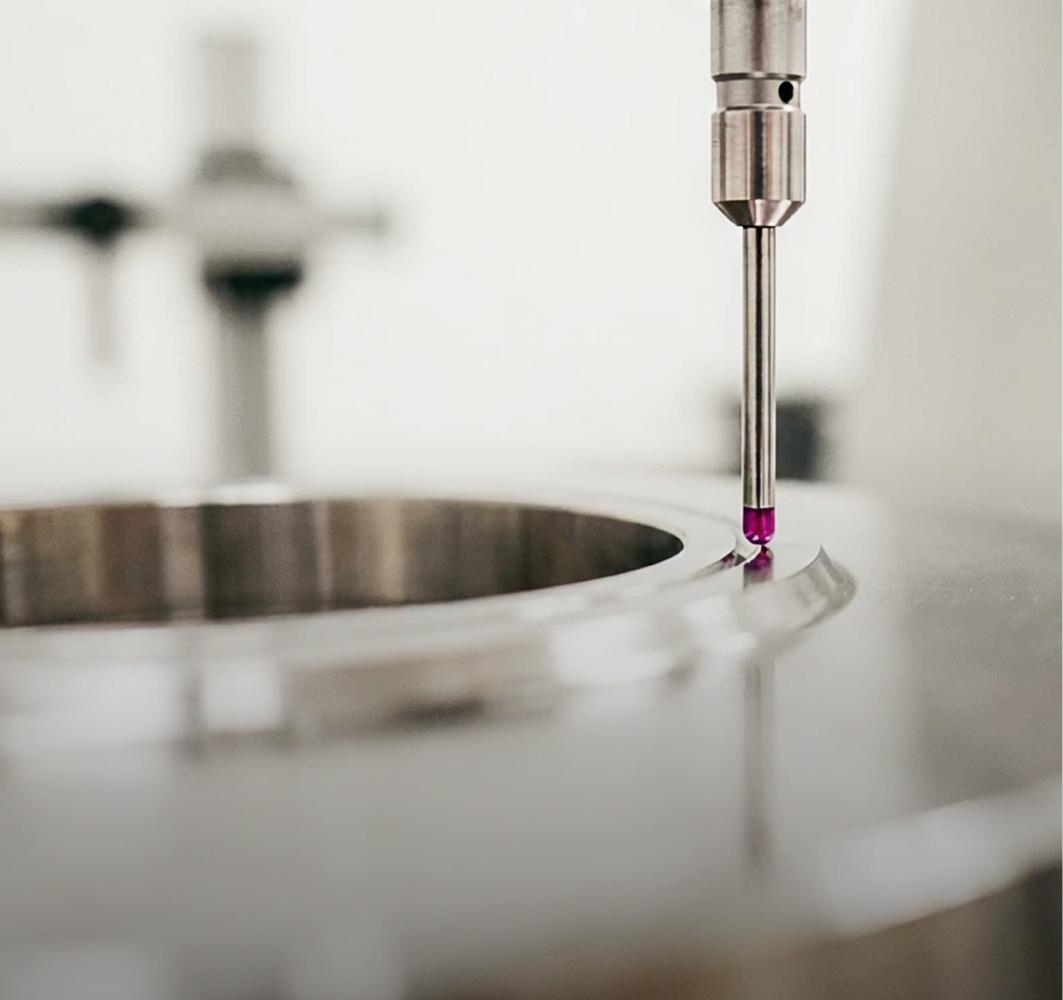
表面检测(Surface Inspection)
在反光、机加工与涂层表面上进行缺陷检测—— 涵盖真实数据集中几乎无法采集的条件。

可变光照下的目标检测(Object Detection under Variable Lighting)
在换班、季节更替与意外环境变化下 仍保持准确率的视觉系统。
精密抓取(Precision Grasping)
得益于数字孪生的亚毫米级几何精度, 在模拟中训练的模型在夹爪上也能原样运行。
FAQ
- 答
它扫描现场,并在数字孪生中批量生成带标注的训练数据。无需真实采集即可获取 AI 训练数据。
- 答
因基于现场扫描,它将域差距最多降低 30%,并在实线测量中达到视觉任务成功率 99%。
- 答
以含自动标注、可直接训练的图像与 3D 帧等形式提供。
- 答
可以。我们以 1mm 以下精度扫描目标设备与工艺,生成针对该环境的专属数据。
- 答
我们与全球机器人企业通过多个 POC 完成了技术验证。